2.5 Motor & Fan
Time to add movement to our projects! DC motors can spin fans, wheels, conveyor belts, or any rotating mechanism. Unlike LEDs that just light up, motors create mechanical motion - they can push, pull, spin, and move things in the real world!
We’re using a TA6586 motor driver chip that lets us control both speed and direction. Think of it as a “motor remote control” that can make the motor spin clockwise, counterclockwise, or stop completely.
Why need a motor driver? Motors are hungry for power! The Pico can’t provide enough current safely, so the TA6586 acts like a power amplifier.
Component List
Raspberry Pi Pico W x1
MicroUSB cable x1
830 Tie-Points Breadboard x1
TA6586 x1
DC Motor x1
Li-po Charger Module x1
Battery Holder x1
Jumper Wire Several
Component knowledge
TA6586
Li-po Charger Module
DC Motor
How bidirectional motor control works:
Direction Control Logic: - Clockwise: Pin A = HIGH, Pin B = LOW → Current flows one direction - Counterclockwise: Pin A = LOW, Pin B = HIGH → Current flows opposite direction - Stop: Both pins = LOW → No current flows
Safety First: The Li-Po charger module provides clean, regulated power to prevent motor damage and protect your circuit from voltage spikes.
Note
Since DC motors require a high current, we use a Li-po Charger module to power the motor here for safety reasons.
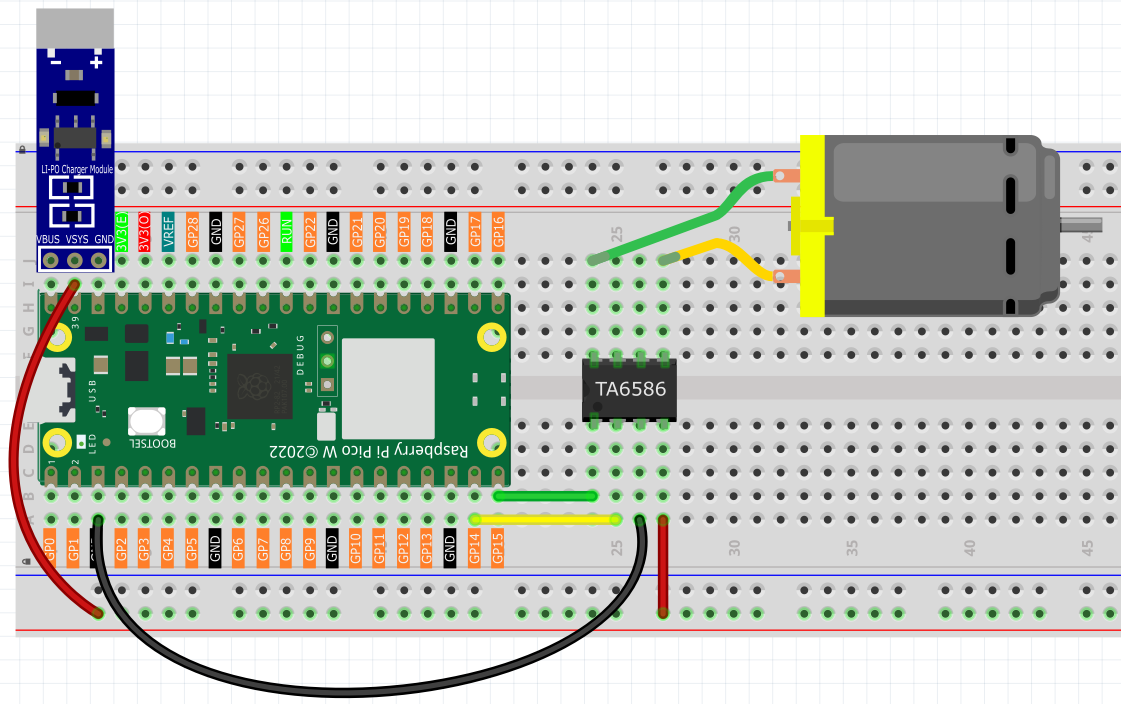
Make sure your Li-po Charger Module is connected as shown in the diagram. Otherwise, a short circuit will likely damage your battery and circuitry.
Connect
Code
Note
Open the
2.5_motor_and_fan.pyfile under the path ofUltimate-Starter-Kit-for-Pico-W\Python\1.Projector copy this code into Thonny, then click “Run Current Script” or simply press F5 to run it.Don’t forget to click on the “MicroPython (Raspberry Pi Pico)” interpreter in the bottom right corner.
After running the code, watch the motor spring into action! It follows a rhythmic pattern: spins clockwise for 1 second, stops for 1 second, spins counterclockwise for 1 second, stops again, then repeats. Perfect for creating oscillating fans, automatic stirrers, or robotic movements!
The following is the program code:
"""
DC Motor and Fan Control Project
This project demonstrates bidirectional control of a DC motor or fan
using digital pins with TA6586 motor driver IC. The motor alternates
between clockwise rotation, stop, counterclockwise rotation, and stop
in a continuous cycle.
Hardware Requirements:
- Raspberry Pi Pico or compatible board
- DC motor or fan
- TA6586 motor driver IC (dual H-bridge)
- Appropriate power supply for motor
"""
# Import required libraries
import machine # For hardware control (Pin)
import utime # For time delays
# Hardware Configuration Constants
MOTOR_PIN_A = 14 # TA6586 IN1 pin (motor direction control)
MOTOR_PIN_B = 15 # TA6586 IN2 pin (motor direction control)
# Timing Constants
ROTATION_DURATION_MS = 1000 # How long motor runs in each direction (milliseconds)
STOP_DURATION_MS = 1000 # How long motor stops between direction changes (milliseconds)
# Initialize motor control pins
motor_pin_a = machine.Pin(MOTOR_PIN_A, machine.Pin.OUT)
motor_pin_b = machine.Pin(MOTOR_PIN_B, machine.Pin.OUT)
def rotate_clockwise():
"""
Rotate Motor Clockwise
Sets the TA6586 motor driver pins to rotate the motor in clockwise direction.
IN1 is set HIGH and IN2 is set LOW to create the forward direction signal.
"""
print("Motor rotating clockwise...")
motor_pin_a.on() # Set TA6586 IN1 HIGH
motor_pin_b.off() # Set TA6586 IN2 LOW
def rotate_counterclockwise():
"""
Rotate Motor Counterclockwise
Sets the TA6586 motor driver pins to rotate the motor in counterclockwise direction.
IN1 is set LOW and IN2 is set HIGH to create the reverse direction signal.
"""
print("Motor rotating counterclockwise...")
motor_pin_a.off() # Set TA6586 IN1 LOW
motor_pin_b.on() # Set TA6586 IN2 HIGH
def stop_motor():
"""
Stop Motor
Stops the motor by setting both TA6586 control pins to LOW.
This puts the motor driver in brake/stop mode, causing the motor to stop spinning.
"""
print("Motor stopped")
motor_pin_a.off() # Set TA6586 IN1 LOW
motor_pin_b.off() # Set TA6586 IN2 LOW
def setup_motor():
"""
Initialize the motor control system
Configures TA6586 motor driver control pins and ensures motor starts in stopped state.
"""
print("Setting up TA6586 motor control...")
print(f"TA6586 IN1 Pin: {MOTOR_PIN_A}")
print(f"TA6586 IN2 Pin: {MOTOR_PIN_B}")
# Ensure motor starts in stopped state
stop_motor()
print("TA6586 motor control setup complete!")
def run_motor_cycle():
"""
Run one complete motor cycle
Executes the sequence: clockwise → stop → counterclockwise → stop
"""
# Run motor clockwise
rotate_clockwise()
utime.sleep_ms(ROTATION_DURATION_MS)
# Stop motor
stop_motor()
utime.sleep_ms(STOP_DURATION_MS)
# Run motor counterclockwise
rotate_counterclockwise()
utime.sleep_ms(ROTATION_DURATION_MS)
# Stop motor
stop_motor()
utime.sleep_ms(STOP_DURATION_MS)
def main():
"""
Main function that runs the motor control demonstration
"""
print("=== DC Motor and Fan Control Project ===")
print("Demonstrating bidirectional motor control")
print("Cycle: Clockwise → Stop → Counterclockwise → Stop")
print("Press Ctrl+C to stop")
print()
# Step 1: Setup the motor control system
setup_motor()
print()
try:
cycle_count = 0
print("Starting continuous motor cycles...")
print()
# Step 2: Continuous motor control loop
while True:
cycle_count += 1
print(f"--- Motor Cycle #{cycle_count} ---")
# Run one complete motor cycle
run_motor_cycle()
print(f"Cycle #{cycle_count} completed")
print()
except KeyboardInterrupt:
print("\nMotor control stopped by user")
print(f"Total cycles completed: {cycle_count}")
# Ensure motor is safely stopped
print("Ensuring motor is stopped...")
stop_motor()
print("Motor control system deactivated")
# Run the program
if __name__ == "__main__":
main()