2.7 Swinging Servo
Meet the servo motor - the “precision mover” of the electronics world! Unlike regular motors that just spin endlessly, servos can move to exact angles and hold their position. Think of it as a robotic arm joint that can point precisely where you tell it to.
Why servos are amazing: - Precise positioning: Move to exact angles (0° to 180°) - Position holding: Stays where you put it, even under load - PWM control: Simple 3-wire connection (power, ground, signal)
Perfect for robot arms, camera gimbals, steering mechanisms, or automatic doors. Let’s create a mesmerizing pendulum motion!
Component List
Raspberry Pi Pico W x1
MicroUSB cable x1
830 Tie-Points Breadboard x1
Servo x1
Jumper Wire Several
Component knowledge
Servo
How servo PWM control works:
PWM Signal Timing: - 0° position: 1ms pulse width → Servo turns fully left - 90° position: 1.5ms pulse width → Servo centers - 180° position: 2ms pulse width → Servo turns fully right
Smooth Movement: Our code moves 1 degree at a time with small delays, creating fluid motion instead of jerky jumps.
Connect
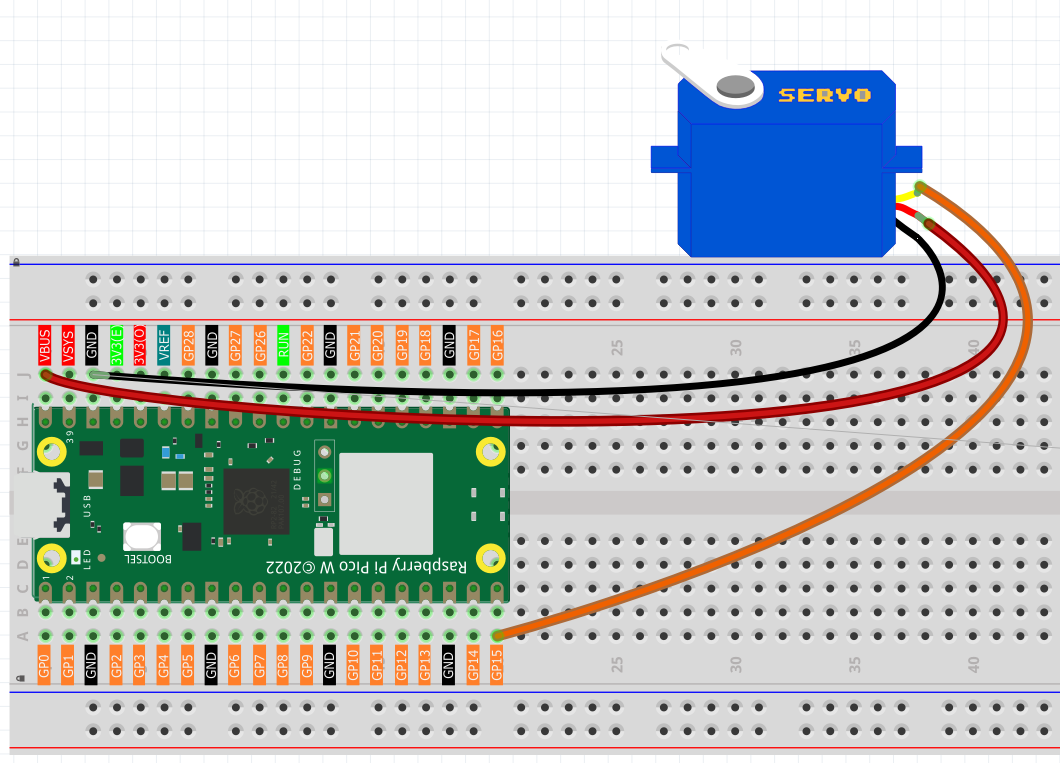
Orange wire is signal and connected to GP15.
Red wire is VCC and connected to VBUS(5V).
Brown wire is GND and connected to GND.
Code
Note
Open the
2.7_swinging_servo.inofile under the path ofUltimate-Starter-Kit-for-Pico-W\Arduino\1.Projector copy this code into Thonny, then click “Run Current Script” or simply press F5 to run it.Or copy this code into Arduino IDE.
Don’t forget to select the board(Raspberry Pi Pico) and the correct port before clicking the Upload button.
After running the code, watch the servo arm create a beautiful pendulum motion! It smoothly sweeps from 0° to 180° (taking 3 seconds), then back to 0° (another 3 seconds), creating a hypnotic back-and-forth rhythm. The movement is perfectly smooth thanks to the 15ms delay between each degree step.
The following is the program code:
/*
* Servo Motor Swinging Project
*
* This project demonstrates smooth servo motor control by creating
* a continuous swinging motion from 0 to 180 degrees and back.
* The servo sweeps back and forth in a pendulum-like motion.
*
* Hardware Requirements:
* - Arduino-compatible board
* - Standard servo motor (SG90 or similar)
* - Appropriate power supply for servo
*/
#include <Servo.h>
// Hardware Configuration Constants
#define SERVO_CONTROL_PIN 15 // Digital pin connected to servo signal wire
// Movement Constants
#define SERVO_MIN_ANGLE 0 // Minimum servo angle (degrees)
#define SERVO_MAX_ANGLE 180 // Maximum servo angle (degrees)
#define SERVO_STEP_DELAY_MS 15 // Delay between each degree step (milliseconds)
#define STARTUP_DELAY_MS 1000 // Initial delay after servo attachment (milliseconds)
// Create servo object to control the servo motor
Servo servoMotor;
/**
* Arduino Setup Function
*
* Initializes the servo motor and sets it to the starting position.
* This function runs once when the Arduino starts up.
*/
void setup() {
// Attach servo to the specified control pin
servoMotor.attach(SERVO_CONTROL_PIN);
// Move servo to starting position (0 degrees)
servoMotor.write(SERVO_MIN_ANGLE);
// Wait for servo to reach starting position
delay(STARTUP_DELAY_MS);
}
/**
* Arduino Main Loop Function
*
* Continuously performs the servo swinging motion.
* Creates a smooth back-and-forth pendulum effect.
*/
void loop() {
// Perform complete swinging cycle
performSwingingMotion();
}
/**
* Perform Complete Swinging Motion
*
* Executes one full cycle of servo movement:
* 1. Swing from minimum to maximum angle
* 2. Swing back from maximum to minimum angle
*/
void performSwingingMotion() {
// Swing forward: from 0 to 180 degrees
swingServoForward();
// Swing backward: from 180 to 0 degrees
swingServoBackward();
}
/**
* Swing Servo Forward
*
* Moves the servo smoothly from minimum angle to maximum angle.
* Each step is delayed to create smooth, visible movement.
*/
void swingServoForward() {
for (int currentAngle = SERVO_MIN_ANGLE; currentAngle <= SERVO_MAX_ANGLE; currentAngle++) {
// Set servo to current angle position
servoMotor.write(currentAngle);
// Wait for servo to reach position before next step
delay(SERVO_STEP_DELAY_MS);
}
}
/**
* Swing Servo Backward
*
* Moves the servo smoothly from maximum angle back to minimum angle.
* Each step is delayed to create smooth, visible movement.
*/
void swingServoBackward() {
for (int currentAngle = SERVO_MAX_ANGLE; currentAngle >= SERVO_MIN_ANGLE; currentAngle--) {
// Set servo to current angle position
servoMotor.write(currentAngle);
// Wait for servo to reach position before next step
delay(SERVO_STEP_DELAY_MS);
}
}